Traditionally, human knowledge is represented mainly in form of written natural language, symbolic formulas and pictures. The project ACKREP aims to supplement these representation forms with additional formal (i.e. machine interpretable) representations. The scope of this project is control theory and control engineering (subsumed under "automatic control").
This discipline is characterized by a wide range of application fields from different physical domains and by a heterogeneous methodical landscape from different areas of mathematics, engineering and computer science.
Basically, the motivation for ACKREP is to facilitate knowledge transfer both
How best to achieve these goals is an open question and subject to ongoing research. More specifically, ACKREP Code constitutes a repository of control-related problems and solutions (represented as executable code). The Methodnet is a more abstract formal representation of control-theoretic methods which can be applied to a concrete setting by linking them via a path-finding algorithm.
This research is carried out at the Institute of Control Theory, TU Dresden.
Important notice: Our current attempts of formal knowledge representation are still very experimental. We highly encourage anybody interested in this topic to contact the ackrep-team with questions, feedback and/or contribution ideas.
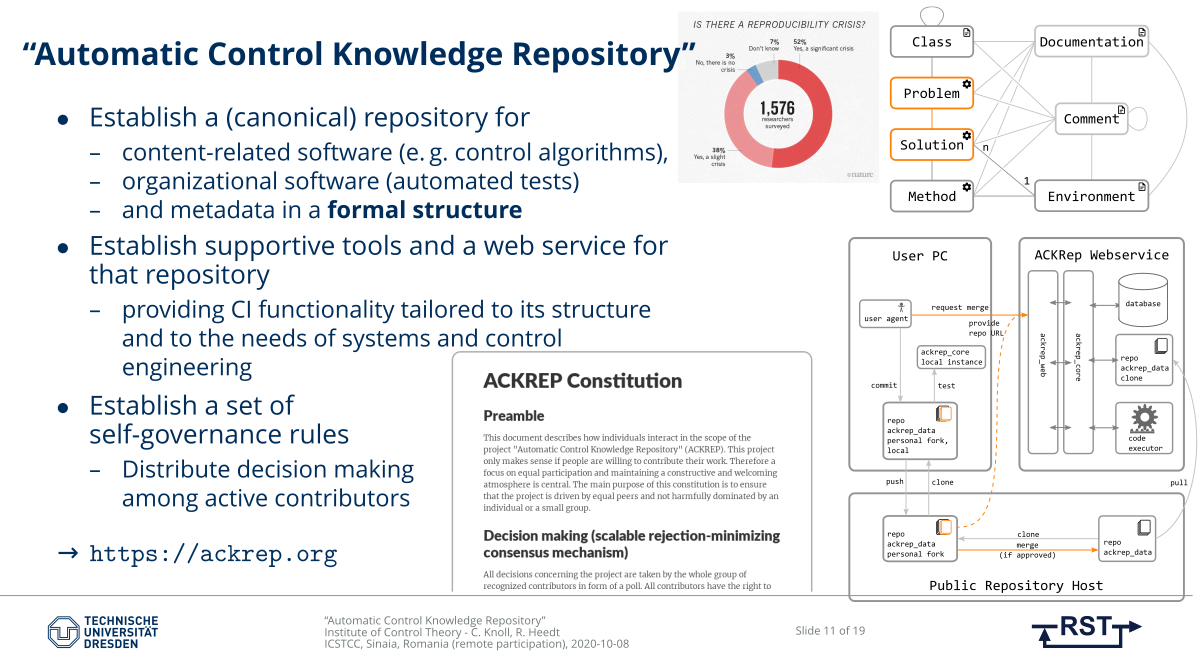
Large parts of control knowledge are comprised of algorithms and are available as executable code, e.g. feedback design, trajectory planning, observability checking etc. However, often this code is not published or at least hard to execute on different environments. This clearly hinders reproducibility and thus knowledge transfer. In [1.1] we therefore propose ACKREP Core (originally just named "ACKRep"): A Git repository which holds control-related code in a special structure (models, problems, solutions, methods, environment specifications, ...) plus a webservice which facilitates access to those entities e.g. via a semantic search interface and which incorporates latest results from an associated continuous integration service. The latter is used to regularlyf check the integrity of all entities along with their dependencies.
References:
[1.3] Carsten Knoll und Robert Heedt: Tool-based Support for the FAIR Principles for Control Theoretic Results: The “Automatic Control Knowledge Repository” Fulltext of Preprint
[1.4] (Old) Demo instance: https://testing.ackrep.org
In [2.1] we propose the Methodnet, a supplement to classical knowledge representation, consisting of types and methods in a graph structure. From that, a schematic solution procedure can be generated for a specific problem. "Trajectory tracking control for a triple pendulum" is used to demonstrate how the proposed method supports knowledge transfer. Furthermore, an OWL-ontology is automatically generated from the methodnet which allows accessing this knowledge base with SPARQL and other semantic methods.
Note: Currently, the development on this project is paused and information about it is yet only available in German.
References:
The entities represented in ACKREP Core should be findable via a semantic search interface (e.g. SPARQL). This implies the availability of a suited vocabulary to formulate those semantic queries. Thus the OCSE is co-developed along with ACKREP but probably will have use cases on its own. To be free from the limited expressive power of OWL this ontology is initially formulated in ERK-framework (see below) but with RDF export already implemented and OWL export in consideration.
Repos:
Usually, declarative languages are used for knowledge representation, such as RDF, OWL (in various syntax variants), json, yaml, etc. However, in the context of the development of the OCSE a more flexible approach is adopted: knowledge is represented imperatively, i.e. directly as function calls in executable code. This bears the advantage that new (experimental) functionality can be implemented directly as part of the knowledge graph without the need of adapting the declarative syntax and the respective parser. The resulting imperative framework is called Emergent Representation of Knowledge (ERK) and supports SPARQL search (via) RDF-Export and rule based reasoning, where the rules are expressed as "usual" ERK entities.
Apart from semantic rules ERK also allows to express the content of mathematical theorems, definitions, conjectures etc. Note, however, that this approach is still in early development, and that the current focus is on expressive power at the cost of e.g. computational complexity and performance.
Repos:
Active members:
Former members:
{kind=link}